São Paulo — InkDesign News —
Uma nova pesquisa em AI apresenta um sistema que melhora a localização de dispositivos em ambientes urbanos densos sem depender de GPS. Esta inovação abre portas para aplicações em veículos autônomos e entrega de mercadorias.
Contexto da pesquisa
Pesquisadores da Universidade de Surrey desenvolveram um sistema de AI, denominado PEnG (Pose-Enhanced Geo-Localization), que combina imagens de satélites e de nível da rua para determinar a localização usando apenas dados visuais. Essa solução confronta os desafios enfrentados em áreas onde o sinal de GPS é interrompido, como túneis e cidades com alta densidade de construções.
Método proposto
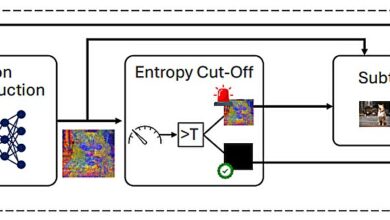
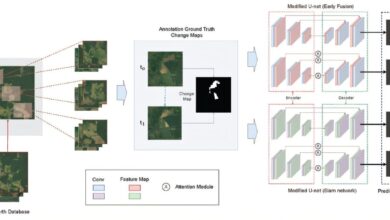
PEnG utiliza um processo em duas etapas: a primeira parte concentra-se na localização em nível de rua, seguida por um aprimoramento utilizando estimativa de pose relativa. Este método permite identificar a posição da câmera e a direção em que está voltada, resultando em uma acurácia que vai de 734 metros para apenas 22 metros. O sistema é baseado em câmeras monoculares padrão, que são comuns em muitos veículos.
“Nosso objetivo era desenvolver uma solução que funcione de forma confiável usando apenas informações visuais. Ao combinar imagens de satélite e de solo, o PEnG atinge um nível de precisão antes considerado inatingível sem GPS.”
(“Our goal was to develop a solution that works reliably using only visual information. By combining satellite and ground-level imagery, PEnG achieves a level of accuracy previously thought unachievable without GPS.”)— Tavis Shore, Pesquisador de Pós-Graduação em AI e Visão Computacional, Universidade de Surrey
Resultados e impacto
A pesquisa demonstra que o PEnG poderia revolucionar a forma como veículos autônomos navegam em ambientes desafiadores. O sistema foi projetado para operar sem a necessidade de GPS, o que o torna ideal para cenários em movimento rápido e imprevisíveis. A precisão alcançada representa um marco importante na navegação autônoma.
“Um dos aspectos mais empolgantes desse sistema é como ele transforma uma câmera monocular simples em uma ferramenta poderosa de navegação.”
(“One of the most exciting aspects of this system is how it turns a simple monocular camera into a powerful navigation tool.”)— Dr. Simon Hadfield, Professor Associado em Visão Robótica e Sistemas Autônomos, Universidade de Surrey
A equipe de Tavis está atualmente focada na construção de um protótipo funcional, apoiado pelo Prêmio de Fundador de Ph.D. da Universidade de Surrey, que financia o desenvolvimento inicial deste dispositivo de navegação livre de GPS. A pesquisa foi lançada como código aberto para incentivar inovações futuras em tecnologias de navegação.
Esse desenvolvimento pode levar a novos avanços em veículos autônomos e ferramentas de navegação inteligente, criando um cenário promissor para a integração de AI e machine learning em sistemas de mobilidade.
Fonte: (TechXplore – Machine Learning & AI)