Contexto da pesquisa
A pesquisa liderada pela Universidade de Surrey apresenta um novo método de
prevenção de deslizamento em robôs, utilizando princípios de machine learning. O estudo, publicado na Nature Machine Intelligence, busca melhorar a interação dos robôs com objetos frágeis e escorregadios, promovendo uma manipulação mais eficiente e segura.
Método proposto
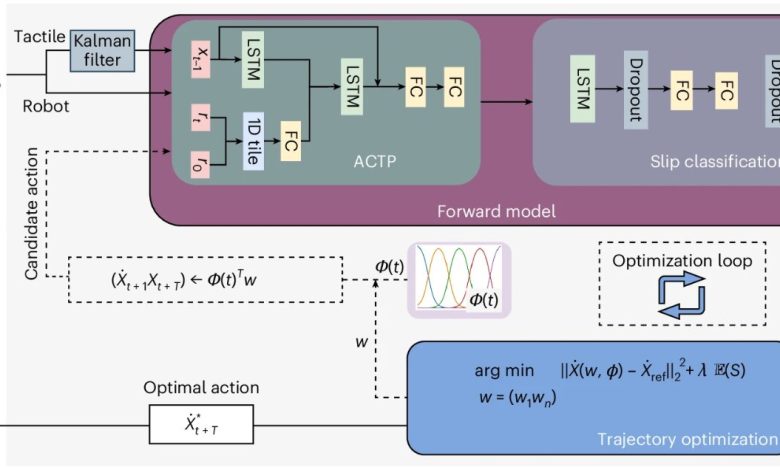
A equipe utilizou um modelo de controle preditivo que é baseado em um “modelo de toque para frente” aprendido. Esse modelo permite que os robôs antecipem quando um objeto pode deslizar e ajustem seus movimentos em tempo real.
“Temos ensinado nossos robôs a adotar uma abordagem mais semelhante à humana, detectando quando algo pode escorregar e ajustando automaticamente seus movimentos para manter os objetos seguros.”
(“We’ve taught our robots to take a more human-like approach, sensing when something might slip and automatically adjusting their movements to keep objects secure.”)— Dr. Amir Esfahani, Professor Associado em Robótica, Universidade de Surrey
Essa metodologia revela um desempenho superior em comparação com as estratégias tradicionais que dependem apenas da força de aperto, que muitas vezes são imprecisas ou até prejudiciais para itens delicados.
Resultados e impacto
Os resultados demonstraram que a abordagem de modulação de trajetória não apenas é eficaz em objetos para os quais não foi treinada, mas também pode ser utilizada em diversos contextos. Isso sugere um potencial significativo para aplicações na indústria e serviços, incluindo saúde e logística.
“Acreditamos que nossa abordagem tem um potencial notável em várias aplicações robóticas industriais e de serviços. Nossa pesquisa abre novas oportunidades para trazer robôs à vida cotidiana.”
(“We believe that our approach has notable potential in a variety of industrial and service robotic applications, and our work opens up new opportunities to bring robots into our daily life.”)— Dr. Amir Esfahani, Professor Associado em Robótica, Universidade de Surrey
Com a capacidade de generalizar de maneira eficaz, esse método pode revolucionar a maneira como os robôs interagem com o ambiente, oferecendo uma manipulação mais delicada e segura. As implicações para a automação de processos, desde a montagem de peças até o manuseio de ferramentas cirúrgicas, são vastas e promissoras. Próximos passos incluem a exploração de mais cenários do mundo real e a adaptação dessa tecnologia para novas aplicações.
Fonte: (TechXplore – Machine Learning & AI)