Uma nova abordagem de aprendizado de máquina (machine learning) teve sucesso em ajudar robôs a navegar sem depender de mapas, resolvendo desafios significativos de localização em ambientes complexos.
Contexto da pesquisa
Pesquisadores da Cardiff University e da Hohai University desenvolveram um novo modelo de aprendizado por reforço profundo (deep reinforcement learning – DRL) que permite que robôs tomem decisões de navegação mais inteligentes, priorizando a configuração do ambiente ao invés de seguir caminhos pré-definidos. O estudo foi publicado na IET Cyber-Systems and Robotics em julho de 2025.
Método proposto
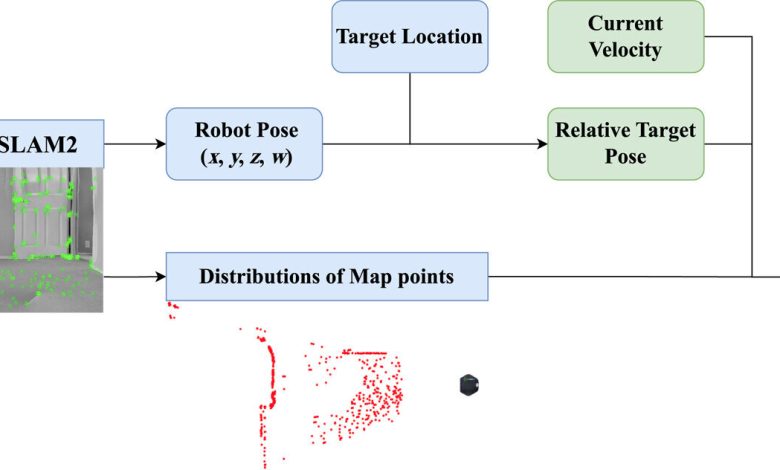
A proposta apresenta uma política de navegação que considera a qualidade da localização a cada decisão de movimento. O robô é treinado utilizando uma representação compacta do estado que reflete a distribuição espacial de pontos visuais, divididos em 24 regiões angulares ao seu redor. Essa abordagem capacita o robô a identificar direções mais seguras para a navegação.
“Nosso objetivo não era apenas ensinar o robô a se mover — era ensiná-lo a pensar sobre quão bem sabe onde está.”
(“Our aim wasn’t just to teach the robot to move—it was to teach it to think about how well it knows where it is.”)— Dr. Ze Ji, Autor Sênior, Cardiff University
Resultados e impacto
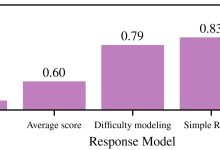
O novo modelo foi avaliado no ambiente simulado iGibson e demonstrou uma taxa de sucesso de 49%, em comparação a 33% das abordagens tradicionais baseadas em SLAM (localização e mapeamento simultâneos). Além disso, mostrou menor erro de localização e melhor adaptação a ambientes novos, optando por rotas mais longas, mas mais seguras. Essa capacidade de priorizar a robustez da localização em relação à eficiência do caminho representa um avanço significativo na navegação autônoma.
A metodologia incorpora um novo sistema de recompensa baseado no Erro de Pose Relativo (Relative Pose Error – RPE), ajustando limites dinâmicos em tempo real, adaptando-se às condições do ambiente.
As implicações do trabalho são amplas, abrangendo robôs de serviço em hospitais e automação de armazéns. A capacidade de avaliar e responder à confiabilidade da localização pode revolucionar a navegação em ambientes onde o GPS é ineficaz.
Os pesquisadores planejam testar o modelo em robôs reais e em cenas dinâmicas que incluem pedestres, contribuindo para um futuro com navegação autônoma mais confiável e sem mapas.
Fonte: (TechXplore – Machine Learning & AI)