São Paulo — InkDesign News —
A pesquisa em machine learning e inteligência artificial está avançando rapidamente, com foco em aplicações que permitem a interação eficiente de múltiplos robôs em ambientes extremos, como a exploração lunar.
Contexto da pesquisa
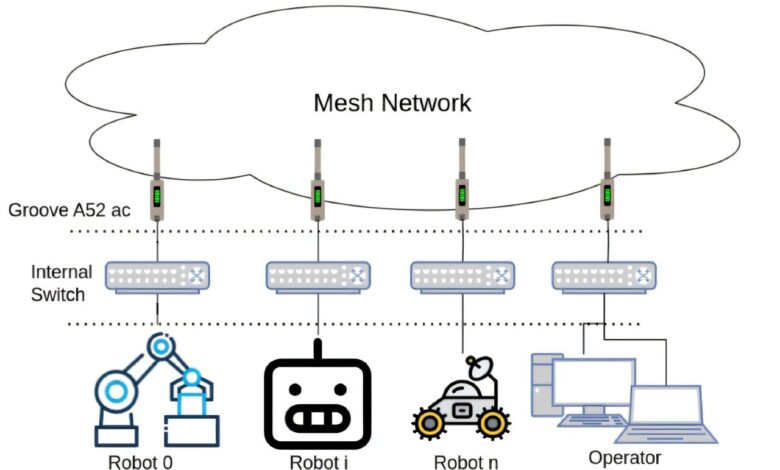
O framework para sistemas robóticos múltiplos é essencial na exploração espacial. Pesquisadores da Universidade de Luxemburgo exploraram a interação entre robôs, abordando como um sistema de rede de malha pode melhorar a comunicação entre eles durante missões em ambientes hostis.
Método proposto
A equipe testou três middlewares do Robot Operating System 2 (ROS2) chamados FastDDS, CycloneDDS e Zenoh, avaliando sua eficácia em uma rede de malha. O FastDDS, comumente utilizado, e o CycloneDDS, especializado em grandes mensagens, foram comparados ao Zenoh, que é otimizado para redes instáveis. A avaliação envolveu medir variáveis como a alcançabilidade dos robôs, a sobrecarga da rede, o tempo de latência e o uso de CPU e RAM.
Resultados e impacto
“Zenoh apresentou melhor desempenho em termos de confiabilidade da rede e sobrecarga de dados, apesar de consumir um pouco mais de poder computacional”
(“Zenoh worked best in terms of network reliability and data overhead, though it used slightly more computational power.”)— Loïck Pierre Chovet, Pesquisador, Universidade de Luxemburgo
Os experimentos foram realizados em um ambiente urbano simulando a dinâmica lunar, incluindo um módulo de pouso, dois rovers e uma antena estática. Os resultados sugerem que, apesar de o Zenoh ser a melhor opção para aplicações espaciais, ainda enfrentaram desafios, como a falha do sistema em lidar com mensagens extensas.
Esses avanços em machine learning podem pavimentar o caminho para a coordenação mais eficaz de robôs em missões interplanetárias futuras, facilitando a busca por novos recursos e dados em ambientes alienígenas.
Fonte: (TechXplore – Machine Learning & AI)