Sistema de simulação gera milhares de exemplos para machine learning
São Paulo — InkDesign News —
Pesquisadores do MIT desenvolveram um sistema inovador de geração de dados que utiliza técnicas de machine learning para treinar robôs, permitindo a escalabilidade de demonstrações em simulações de maneira eficiente.
Contexto da pesquisa
A tarefa de reunir dados instrutivos para o treinamento de robôs é complexa, especialmente quando se considera a necessidade de ensinar movimentos específicos em diferentes ambientes, como casas e fábricas. Métodos tradicionais como a teleoperação podem ser demorados, enquanto o uso de vídeos da internet muitas vezes carece de informações estruturadas e detalhadas.
Método proposto
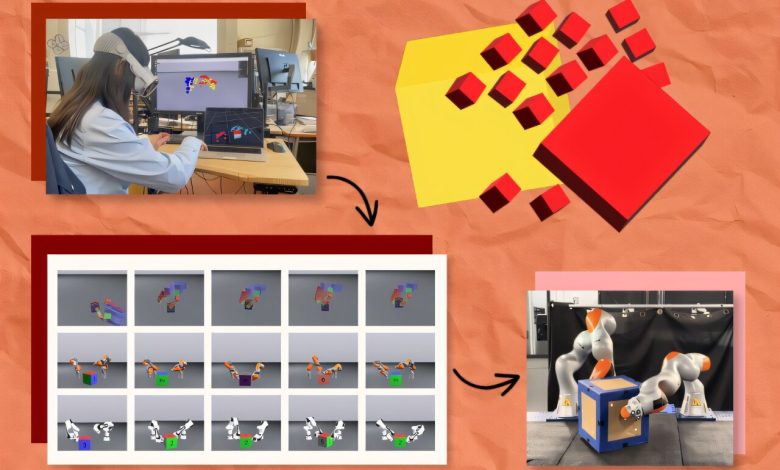
O modelo chamado “PhysicsGen”, desenvolvido pelo Computer Science and Artificial Intelligence Laboratory (CSAIL) do MIT, utiliza uma abordagem de simulação que multiplica demonstrações em realidade virtual (VR) para criar cerca de 3.000 simulações por máquina. O processo é dividido em três etapas: primeiro, um headset de VR registra como humanos manipulam objetos; em seguida, essas interações são mapeadas em um simulador de física 3D; por fim, otimizações de trajetória são aplicadas para simular os movimentos mais eficientes.
Resultados e impacto
Em testes, utilizando 24 demonstrações humanas, o sistema alcançou uma taxa de precisão de 81% em um experimento virtual, demonstrando uma melhoria de 60% em relação a métodos que se basearam apenas nas demonstrações humanas. Além disso, o PhysicsGen possibilitou que pares de robôs colaborassem com até 30% mais eficiência em tarefas de manipulação em comparação a abordagens tradicionais.
“Estamos criando dados específicos para robôs sem a necessidade de que humanos regravam demonstrações especializadas para cada máquina.”
(“We’re creating robot-specific data without needing humans to re-record specialized demonstrations for each machine.”)— Lujie Yang, Estudante de doutorado, MIT
O potencial do PhysicsGen se estende à conversão de dados previamente coletados para robôs antigos ou em ambientes diferentes, ajudando a revitalizar conjuntos de dados para uma utilidade mais ampla.
No futuro, os pesquisadores visam aplicar o PhysicsGen em tarefas diversificadas, como ensinar um robô a despejar água, mesmo que ele tenha sido treinado apenas para guardar louças. Com a capacidade de gerar uma biblioteca diversificada de interações físicas, o sistema pode servir de base para tarefas inéditas que não foram demonstradas.
Fonte: (TechXplore – Machine Learning & AI)