São Paulo — InkDesign News — O desenvolvimento recente de simuladores para ligas de robótica, como a RoboCup, está aprimorando as capacidades de robôs autônomos, principalmente em ambientes competitivos. Com foco em algoritmos de controle e integração de novos sensores, tais inovações prometem impactos significativos em várias indústrias.
Tecnologia aplicada
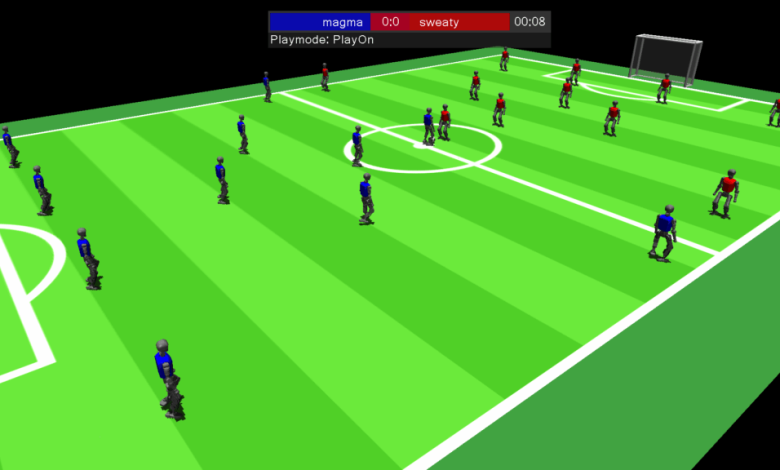
O novo simulador da Liga de Simulação 3D utiliza o motor físico MuJoCo, que permite manipulações avançadas do espaço de simulação, como a adição e remoção de objetos em tempo real enquanto o estado da simulação se preserva. Essa abordagem é interessante para a criação de cenários dinâmicos, pois oferece uma representação mais realista do controle motriz dos robôs, aproximando-se da física de robôs reais.
A atual simulação é fisicamente realista, mas não permite transições fáceis para robôs reais.
(“The simulation is physically somewhat realistic, but not in the sense that it’s easy to transpose it to a real Nao robot.”)— Klaus Dorer, Membro do Comitê Executivo, RoboCup
Desenvolvimento e testes
A nova plataforma está em sua fase inicial de desenvolvimento, com testes já realizados para avaliar a resposta dos robôs em diferentes situações. A configuração atual permite até 22 conexões simultâneas, onde agentes individuais controlam robôs distintos, recebendo apenas informações sensoriais relevantes. As equipes são encorajadas a adaptar seus softwares para esta nova base minimizando a complexidade de transição.
A ideia é que as equipes possam usar o novo simulador com esforço mínimo na adaptação de seus softwares de agente.
(“The idea is that the teams can use the new simulator with minimal effort in adapting their current agent software.”)— Stefan Glaser, Membro do Comitê de Manutenção, RoboCup
Impacto e aplicações
Estas novas abordagens não apenas melhoram a performance em competições da RoboCup, mas também trazem consequências práticas para a indústria robótica. O intuito é que comportamentos desenvolvidos na simulação possam ser replicados em robôs reais, facilitando o teste de habilidades em ambientes variados. Isso é crucial para setores que necessitam de soluções robóticas em situações complexas, como logística, manufatura e assistência médica.
O próximo passo para as equipes será entender como otimizar os algoritmos de controle para que os robôs consigam executar tarefas, como chutar com precisão, o que pode revolucionar o treinamento em robótica.
Fonte: (Robohub – Robótica & Automação)