Rede neural melhora navegação robótica em 30% ao imitar humanos
São Paulo — InkDesign News —
Pesquisadores do Daegu Gyeongbuk Institute of Science and Technology desenvolveram uma nova tecnologia de “AI Física” que melhora a eficiência de navegação autônoma de múltiplos robôs, abordando fenômenos sociais no aprendizado de máquina.
Contexto da pesquisa
Os robôs móveis autônomos (AMRs) são cruciais para a automação em centros de logística e fábricas. Contudo, interrupções imprevistas, como empilhadeiras e carga mal posicionada, frequentemente comprometem o fluxo de trabalho. Até o momento, os robôs reagiam a situações imediatas, ajustando suas rotas de maneira reativa, o que resultava em desvios desnecessários.
Método proposto
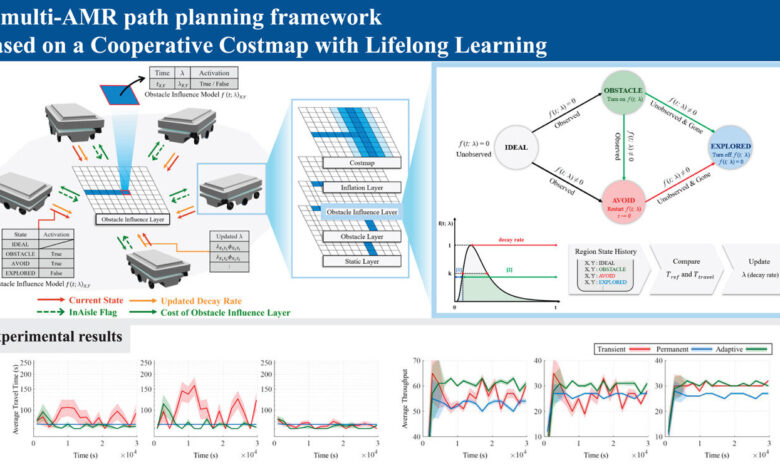
A equipe liderada pelo Professor Kyung-Joon Park aplicou o fenômeno social de como certos eventos são rapidamente esquecidos. Modelando matematicamente esse processo, integraram-no a um algoritmo de inteligência coletiva para robôs. Essa abordagem permite que os robôs “esqueçam” informações irrelevantes e compartilhem apenas os detalhes importantes, resultando em uma navegação cooperativa mais eficiente.
Resultados e impacto
Utilizando o simulador “Gazebo,” que reproduz ambientes de logística, os pesquisadores identificaram um aumento de até 18% na produtividade de tarefas e uma redução de até 30,1% no tempo médio de deslocamento, em comparação com métodos tradicionais de navegação ROS 2. Essa descoberta revela que os robôs estão se tornando sistemas de AI Física que compreendem princípios sociais e operam de forma autônoma. O professor Park comentou:
“Imitamos o princípio social de esquecer informações desnecessárias enquanto mantemos apenas o que é importante para um movimento eficiente.”
(“We have mimicked the social principle of forgetting unnecessary information while retaining only important information to enable efficient movement.”)— Professor Kyung-Joon Park, Departamento de Engenharia Elétrica e Ciência da Computação, DGIST
Além disso, essa tecnologia pode ser aplicada usando apenas LiDAR 2D, compatível com o stack de navegação ROS 2, permitindo uma rápida implementação em sistemas existentes de navegação autônoma. As aplicações potenciais incluem gerenciamento de tráfego em cidades inteligentes e operações de resgate em larga escala.
Fonte: (TechXplore – Machine Learning & AI)