São Paulo — InkDesign News — Pesquisadores do Massachusetts Institute of Technology (MIT) desenvolveram uma aplicação inovadora de machine learning e inteligência artificial para um sistema robótico que joga tênis de mesa com alta precisão e velocidade. A pesquisa une visão computacional, controle preditivo e manipulação robótica para antecipar e responder rapidamente a trajetórias complexas da bola.
Contexto da pesquisa
O tênis de mesa robótico é um desafio que demanda integração de tecnologias como visão computacional de alta velocidade, motores rápidos e controle preciso e em tempo real. Desde os anos 1980, grupos vêm experimentando robôs capazes de devolver a bola, com avanços recentes envolvendo aprendizado de máquina para aprimorar a performance contra uma variedade crescente de golpes. O MIT explora esta funcionalidade para ir além do jogo, aplicando-a em robótica humanoide e cenários de resgate.
Método proposto
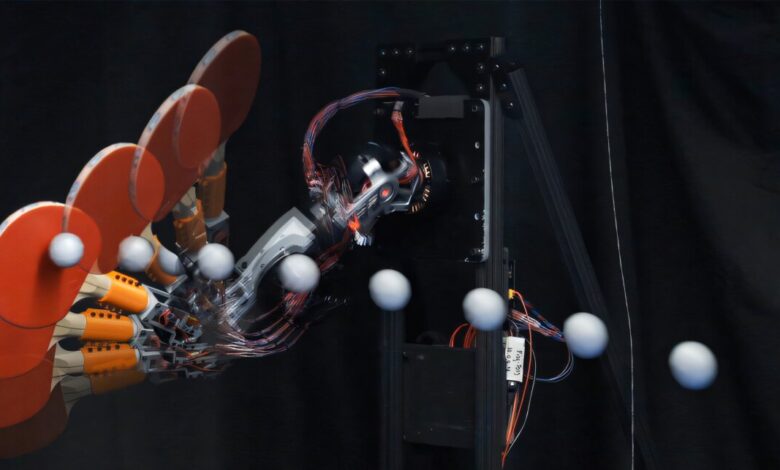
O sistema utiliza um braço robótico multifuncional com cinco graus de liberdade, equipado com uma raquete de tênis de mesa fixado em uma das extremidades da mesa. Sensores de câmeras de alta velocidade monitoram a trajetória da bola. Um algoritmo de controle preditivo por modelo (MPC) calcula a velocidade e orientação ideais da raquete para executar golpes variados — loop (top spin), drive (reta) e chop (backspin) — em até 300 milissegundos. O processamento é distribuído em três computadores que capturam imagens, estimam o estado real da bola e transmitem comandos aos motores.
Resultados e impacto
Em testes com 150 bolas lançadas consecutivamente, a precisão média de retorno foi de cerca de 88% para todos os tipos de golpe. A velocidade de impacto da raquete alcançou até 19 metros por segundo, próxima ao nível de jogadores humanos avançados, que batem entre 21 e 25 m/s. O sistema também foi aprimorado para direcionar a bola a pontos específicos da mesa, aumentando a aplicação da abordagem para estratégias de jogo.
“Os problemas que estamos resolvendo, especificamente relacionados a interceptar objetos rápida e precisamente, podem ser úteis em cenários onde um robô precisa executar manobras dinâmicas e planejar, em tempo real, onde seu atuador encontrará um objeto”
(“The problems that we’re solving, specifically related to intercepting objects really quickly and precisely, could potentially be useful in scenarios where a robot has to carry out dynamic maneuvers and plan where its end effector will meet an object, in real-time.”)— David Nguyen, estudante de pós-graduação, MIT
A pesquisa sugere que a técnica pode exceder o tênis de mesa, melhorando a agilidade e responsividade de robôs humanoides em ambientes industriais ou de resgate, onde a antecipação e reação rápidas são essenciais.
Próximos passos incluem ampliar o campo de ação do robô, montando-o em plataformas móveis para cobrir mais área da mesa e enfrentar uma gama maior de jogadas, potencializando seu uso em sistemas inteligentes de treinamento e robótica geral.
Fonte: (TechXplore – Machine Learning & AI)