modelo de deep learning usa realidade virtual para ensinar robôs a formar enxames
Konstanz — InkDesign News — Pesquisadores utilizam machine learning para desvendar o comportamento de cardumes de peixes e aplicá-lo em robótica cooperativa, revelando soluções naturais para controle autônomo eficiente.
Contexto da pesquisa
Estudos recentes buscam reproduzir a coordenação robusta e flexível de cardumes de peixes em sistemas robóticos e veículos autônomos. Uma equipe da Universidade de Konstanz, Alemanha, aplicou técnicas de inteligência artificial para entender a lógica de movimento coletivo dos peixes, inspirando novos modelos de controle para robôs.
Método proposto
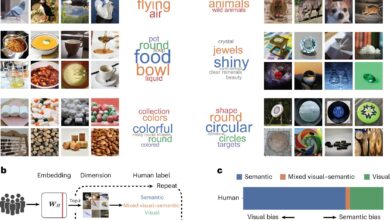
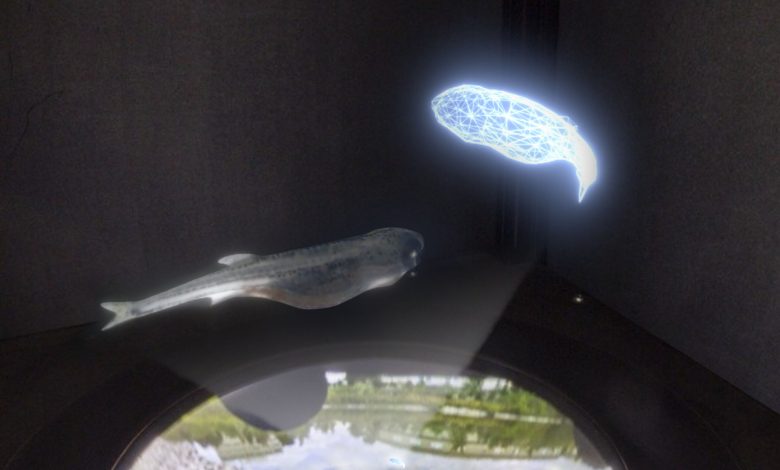
A pesquisa utilizou um sistema de realidade virtual para peixes-zebra juvenis, permitindo que cada indivíduo interagisse livremente com “conspecíficos holográficos” — projeções baseadas em peixes reais de arenas diferentes, criando um ambiente virtual imersivo em 3D. Esse isolamento permitiu captar cues visuais específicos e reverter o algoritmo comportamental do agrupamento de peixes, fundamentado unicamente na posição relativa percebida dos vizinhos, excluindo velocidades.
O modelo é caracterizado por regras locais cognitivamente simples que regulam o seguimento e a formação do grupo. Para validar, aplicaram um “teste de Turing aquático”, no qual peixes reais interagiam tanto com peixes virtuais controlados pelo algoritmo quanto com peixes reais, sem distinguir entre eles.
Resultados e impacto
O modelo descoberto foi incorporado em enxames de carros, drones e barcos robóticos que seguiram alvos em movimento. Os resultados indicam que o controle natural dos peixes alcançou desempenho comparável ao método avançado Model Predictive Controller (MPC), tanto em acurácia quanto em consumo energético, porém com complexidade muito menor.
“Ficamos surpresos com a pouca informação que os peixes precisam para coordenar eficientemente seus movimentos.”
(“We were surprised by how little information the fish need to effectively coordinate movements within a school.”)— Iain Couzin, Diretor do MPI-AB
“Nosso trabalho ilustra que soluções evoluídas pela natureza podem inspirar leis de controle robustas e eficientes em sistemas artificiais.”
(“Our work illustrates that solutions evolved by nature over millennia can inspire robust and efficient control laws in engineered systems.”)— Liang Li, Universidade de Konstanz
Este avanço evidencia a relação simbiótica entre biologia e robótica, onde o entendimento de mecanismos naturais guia o desenvolvimento de estratégias mais eficientes para sistemas autônomos.
Próximos passos podem incluir aprimoramentos para cenários mais complexos de interação múltipla e aplicações em carros autônomos, drones em missões coordenadas e veículos marítimos, ampliando as fronteiras da inteligência artificial aplicada.
Para saber mais sobre inteligência artificial e machine learning, visite Machine Learning e Deep Learning.
Fonte: (TechXplore – Machine Learning & AI)