São Paulo — InkDesign News —
Pesquisadores do Laboratório de Ciência da Computação e Inteligência Artificial do MIT (CSAIL) apresentaram uma inovadora abordagem de controle para robôs, utilizando um sistema denominado Campos Jacobianos Neurais (NJF). A pesquisa foi publicada em 25 de junho na revista Nature.
Tecnologia aplicada
O sistema NJF permite que robôs aprendam a controlar seus movimentos apenas por meio da observação visual, sem depender de sensores complexos ou modelos previamente codificados. Utilizando uma única câmera e técnicas de modelagem, como campos de radiância neurais (NeRF), o NJF aprende tanto a geometria tridimensional do robô quanto a sua sensibilidade a comandos motores. “Este trabalho aponta para uma mudança de programar robôs para ensinar robôs”, afirmou Sizhe Lester Li, estudante de doutorado em engenharia elétrica e ciência da computação e principal pesquisador do estudo.
“Hoje, muitas tarefas de robótica requerem extensa engenharia e codificação. No futuro, envisionamos mostrar a um robô o que fazer e deixá-lo aprender como atingir o objetivo autonomamente.”
(“Today, many robotics tasks require extensive engineering and coding. In the future, we envision showing a robot what to do, and letting it learn how to achieve the goal autonomously.”)— Sizhe Lester Li, Estudante de doutorado, MIT
Desenvolvimento e testes
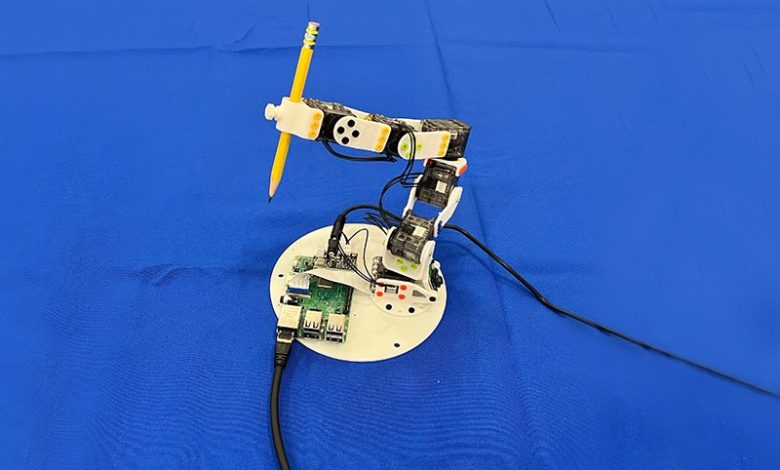
Os pesquisadores treinaram o modelo NJF em diversas configurações robóticas, incluindo uma mão robótica pneumática, uma mão rígida Allegro e um braço robótico impresso em 3D. O sistema foi respirado durante movimentos aleatórios enquanto múltiplas câmeras gravavam os resultados. A formação não exigiu supervisão humana ou conhecimento prévio da estrutura do robô, inferindo a relação entre sinais de controle e movimento apenas observando. O robô, após o treinamento, é capaz de operar em tempo real com aproximadamente 12 Hertz, complementando a capacidade de observar e agir responsivamente.
Impacto e aplicações
Os benefícios operacionais do NJF são substanciais, pois eliminam a necessidade de sensores caros e sofisticados, abrindo caminho para robôs mais acessíveis e adaptáveis em ambientes não estruturados. “Robótica hoje muitas vezes se sente fora de alcance por causa de sensores custosos e programação complexa”, disse Vincent Sitzmann, professor assistente do MIT.
“Nosso objetivo com os Campos Jacobianos Neurais é baixar a barreira, tornando a robótica acessível e adaptável a mais pessoas.”
(“Our goal with Neural Jacobian Fields is to lower the barrier, making robotics affordable, adaptable, and accessible to more people.”)— Vincent Sitzmann, Professor Assistente, MIT
Com a capacidade de realizar tarefas em agricultura com precisão de centímetros e operar em canteiros de obras sem complexos arranjos de sensores, o NJF demonstra potencial para transformar a forma como os robôs interagem com ambientes dinâmicos.
O futuro da robótica suave, alicerçado em sistemas de aprendizado como o NJF, aponta para uma redução na dependência de modelos rígidos e sensores, realçando a importância de controladores baseados em visão. A busca por generalização em diferentes robôs e a inclusão de sensibilidade tátil seguem como desafios a serem explorados.
Fonte: (The Robot Report – Robótica & Automação)