São Paulo — InkDesign News —
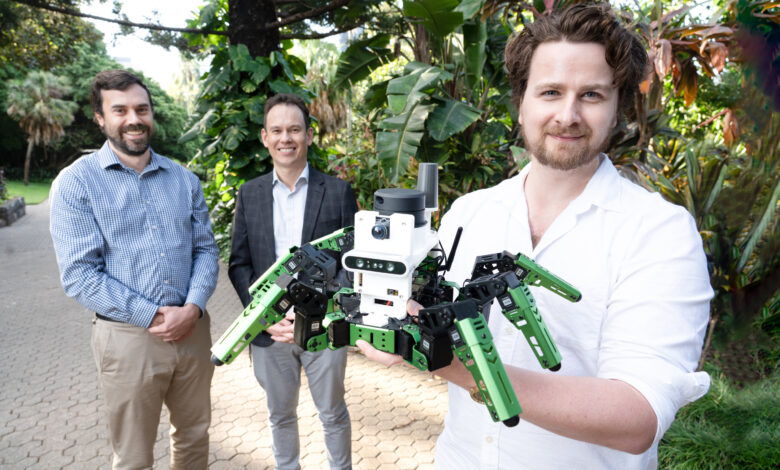
Pesquisadores da Queensland University of Technology (QUT) desenvolveram um novo sistema de navegação robótica que utiliza aprendizado de máquina inspirado no cérebro humano, garantindo uma eficiência energética significativamente superior às abordagens tradicionais.
Contexto da pesquisa
A implementação de sistemas de localização robustos e de baixa energia é crucial em aplicações de robótica, como busca e salvamento e explorações espaciais. A pesquisa foi liderada pelo Dr. Adam Hines, com a colaboração do Professor Michael Milford e do Dr. Tobias Fischer, todos do Center of Robotics da QUT.
Método proposto
O sistema batizado LENS (Locational Encoding with Neuromorphic Systems) utiliza computação neuromórfica, onde algoritmos especializados aprendem de forma semelhante aos humanos. Este modelo processa informações na forma de picos elétricos, imitando os sinais utilizados por neurônios reais. O sistema é descrito como capaz de reconhecer localizações durante uma jornada de 8 km, utilizando apenas 180KB de armazenamento, quase 300 vezes menos que outros sistemas.
“Por meio da computação neuromórfica, nosso sistema reduz os requisitos energéticos de localização visual em até 99%, permitindo que robôs operem por mais tempo e cubram maiores distâncias com fontes de energia limitadas.”
(“By using neuromorphic computing, our system reduces the energy requirements of visual localization by up to 99%, allowing robots to operate longer and cover greater distances on limited power supplies.”)— Dr. Adam Hines, Pesquisador, Queensland University of Technology
Resultados e impacto
O LENS combina uma rede neural inspirada no cérebro com uma câmera especial que reage apenas ao movimento, além de um chip de baixo consumo de energia, tudo em um único robô compacto. O uso de uma câmera de eventos, que detecta mudanças em microsegundos, torna a abordagem eficiente na captura de informações visuais.
“Esta pesquisa demonstra que a computação neuromórfica pode alcançar rastreamento de localização em tempo real e eficiente em termos de energia em robôs, abrindo novas possibilidades para tecnologias de navegação.”
(“This system demonstrates how neuromorphic computing can achieve real-time, energy-efficient location tracking on robots, opening up new possibilities for low-power navigation technology.”)— Dr. Adam Hines, Pesquisador, Queensland University of Technology
O estudo subsequente reforça a capacidade do LENS de realizar reconhecimento de lugares de forma eficiente, um problema que, embora trivial para humanos, apresenta desafios significativos para máquinas. Com a evidente redução no consumo de energia, o sistema está posicionado para ampliar as capacidades de robôs remotos em exploração e operação prolongada.
Possíveis aplicações incluem robôs de busca e resgate, exploração submarina e missões espaciais, com o objetivo de otimizar a eficiência energética em ambientes adversos.
Fonte: TechXplore – Machine Learning & AI